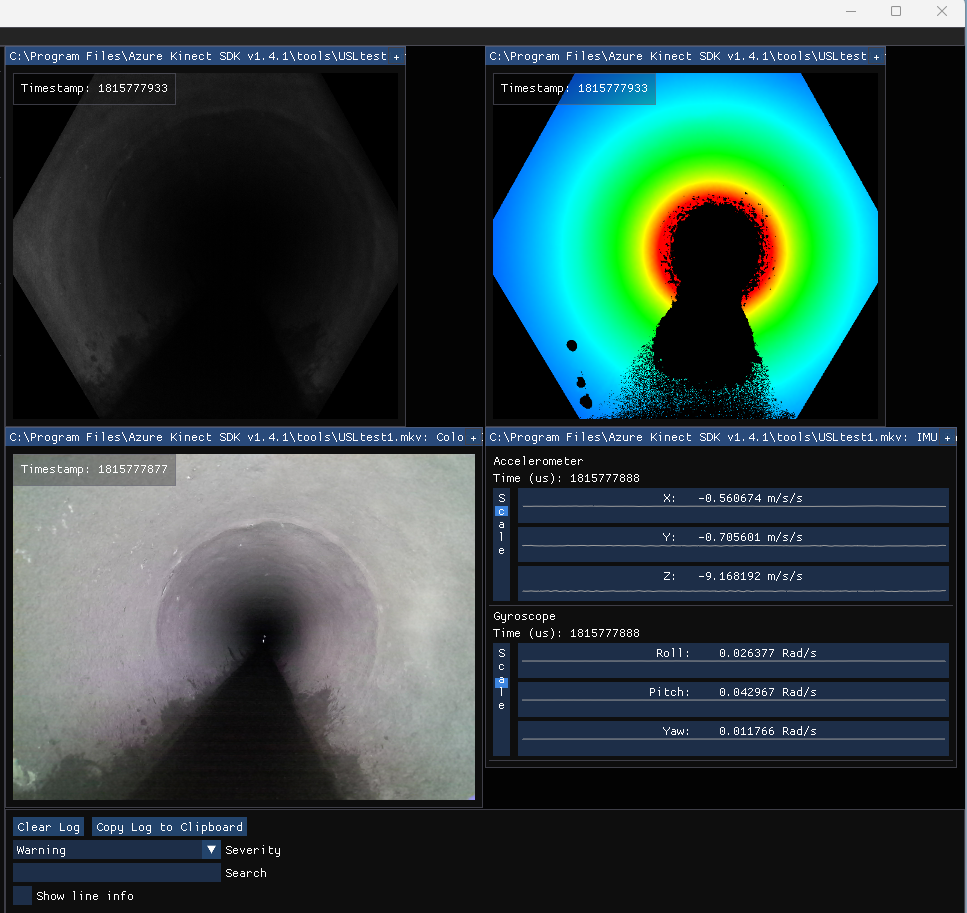
CSI is working with EBMUD to develop a cutting-edge autonomous robotic tunnel inspection platform. This framework involves deploying state-of-the-art sensing technologies (3D stereo camera, 360 camera, and multi-gas sensors) on board a quadruped terrestrial robot (Boston Dynamics Spot). The platform allows for detailed analysis of the tunnel’s condition by enabling engineers to quickly identify potential issues such as tunnel lining damage or leaks and offers a substantial improvement over human-based inspections by reducing the risk of injury and speeding up the process considerably. This innovative system was first deployed to the EBMUD Upper San Leandro water tunnel in June of 2023. This pioneering approach represents a transformative leap in tunnel inspection capabilities.


Collaborator: East Bay Municipal Utility District (EBMUD)
Researchers: Wonjun Cha, Maksymilian Jasiak, Dayu Apoji, Kenichi Soga (UC Berkeley), Stephanie Matula (EBMUD)
Domains: Water Infrastructure
Capabilities: Robotics
Publications: TBA!